
Author: Zhenchi Zhong (Software Engineer at PingCAP)
Transcreator: Caitin Chen; Editor: Tom Dewan
TiKV is a distributed key-value database. It has higher performance requirements than a regular application, so tracing tools must have minimal impact. This article describes how we achieved tracing all requests’ time consumption in TiKV with less than 5% performance impact.
Background knowledge
Logs, metrics, and traces are the three pillars of system observability. The following figure shows their relationship:
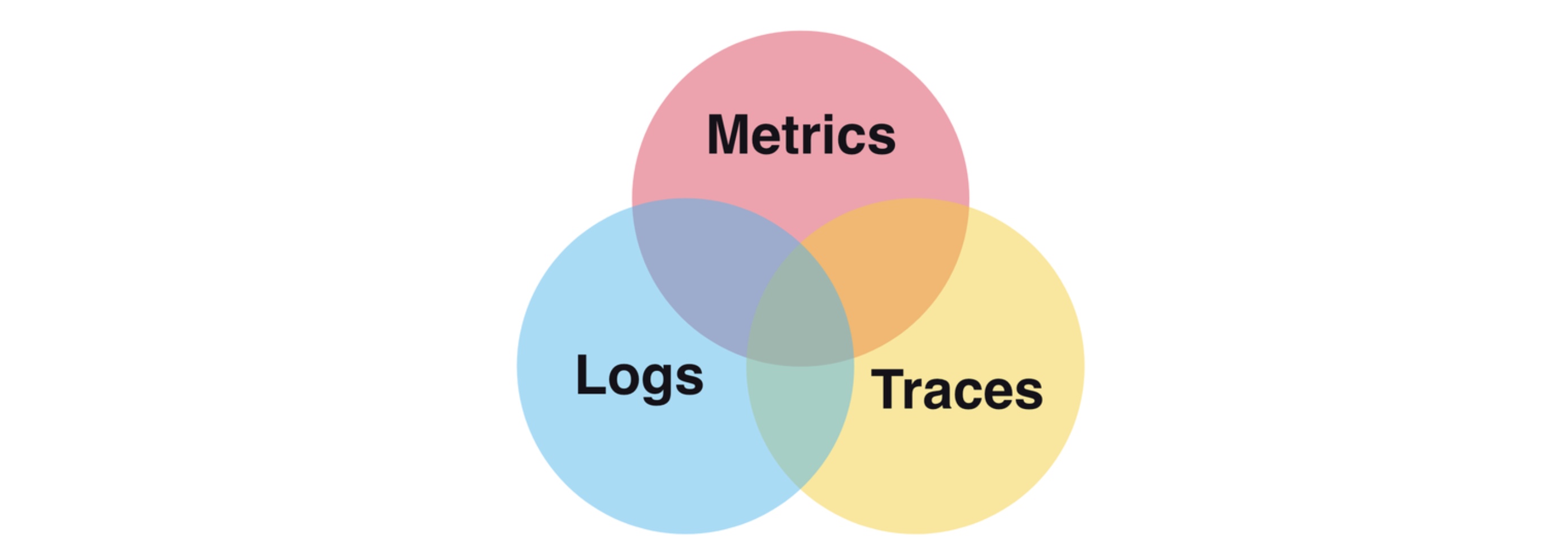
Logs, metrics, and traces
- Logs record discrete error and status information.
- Metrics record and present aggregatable data.
- Traces are a series of events for a single request.
TiKV has a complete log and metric system, but lacks traces. Therefore, when we troubleshoot TiKV and TiKV’s SQL layer, TiDB, we may encounter these issues:
- There is no correlation between observation data. To trace and diagnose the system, you must understand all the operations in a request and their corresponding metrics. Few people have such comprehensive knowledge.
- It’s difficult to trace request jitters. Monitoring metrics such as AVG, P99, and MAX don’t reflect requests’ performance jitter when request payloads are mixed together.
Tracing solves the two problems. Now, I’ll share in detail how we implemented high-performance tracing in TiKV. It is still an experimental feature in TiKV, and, to open it, you need a specific code branch. If you’re interested, follow Introduce tracing framework (#8981) on GitHub.
Basic concepts
Tracing shows the execution path of a request in the system. For example, the following figure is a trace of an SQL statement’s execution process from TiDB to TiKV:

Tracing an SQL statement’s execution
From this figure, we can learn the following information about the INSERT INTO t VALUES (1), (2), (3); statement:
- When TiDB processes this request, it performs three steps: compiling, planning, and executing.
- When TiDB executes this statement, it calls TiKV’s Prewrite remote procedure call (RPC) and Commit RPC.
- The request takes 5 ms.
In the figure, a box represents an event called a “span.” Each span contains:
- An event name
- Start and end timestamps
Spans are hierarchical, forming a parent-child relationship or a sequence relationship, as shown in the figure below:

Spans
Implementation
In this article, unless otherwise specified, we used the following test platform:
- CPU: Intel Core i7-8700
- Linux distros: Ubuntu 20.04
- Linux kernel: 5.4
- Memory: 32 GB
- Disk: NVM Express® (NVMe) SSD
TiKV is written in Rust. The Rust community has several off-the-shelf tracing libraries, for example, tokio-tracing, rustracing, and open-telemetry. They all follow the OpenTracing specification, but their performance is not ideal. We discovered that TiKV’s performance can be reduced by more than 50% when introducing these libraries.
TiKV’s tracing implementation impacts performance by less than 5% by tracing and collecting spans efficiently, which only takes 20 ns.

Overhead per span
Now let’s see how it works.
Time measurements
Time is measured frequently in tracing. Each span needs two timestamps: the event’s start and end time. Therefore, timing performance is critical.
Generally, to measure time for tracing, the measurement must ensure:
- The timestamp monotonically increases
- High performance
- High precision
std::Instant
Rust offers two structures in std to measure time:
std::SystemTime::now()It obtains the current system time. The downside is that the obtained timestamp is not monotonic, for example, when a user manually changes the clock, or there is a NTP service.std::Instant::now()It obtains monotonically increasing timestamps with nanosecond precision. Most Rust tracing libraries use it, but its performance is not ideal: it takes 50 ns to obtain timestamps twice. This is one of the reasons why most Rust tracing libraries do not trace efficiently.
Coarse time
If you need efficient time measurement, coarse time is usually a good choice. Coarse time can be obtained by passing CLOCK_MONOTONIC_COARSE to the clock_gettime system call in Linux. The Rust community provides the coarsetime crate to read coarse time easily:
{{< copyable “” >}}
coarsetime::Instant::now()
Coarse time is so fast that it takes only 10 ns to obtain two timestamps. Its precision is low though, depending on Linux’s configuration. The default precision is 4 ms.
In most cases, coarse time can be the first choice, as:
- It’s out of the box in the Linux system and easy to obtain.
- For most applications, the 4 ms precision is acceptable.
However, in TiKV’s tracing scenarios, low-precision time measurement can lead to confusing results as shown below:

High precision vs. low precision for time measurement
To support tracing at microseconds or even nanoseconds precision while keeping performance, we use Time Stamp Counter (TSC).
TSC
The TSC register has existed in modern x86 architecture CPUs since the Pentium processor introduced in 2003. It records the number of CPU clock cycles since reset. When the CPU clock rate is constant, it can be used for high-precision timing.
The TSC meets the requirements of monotonic increase, high precision, and high performance at the same time. In our test environment, it only takes 15 ns to fetch TSC twice.
The TSC register cannot be used directly. When it’s used as a time source, it has several problems that affect the accuracy, as listed below.
TSC increment rate
TSC increment rate is determined by the CPU frequency. Modern CPUs may dynamically adjust its frequency, for example, to save energy. As a result, the TSC increment rate is not constant:

TSC increment rate
In addition, some CPUs do not increase the TSC in sleep mode:

TSC doesn’t increment when the CPU sleeps
Some modern x86 architecture CPUs provide features to ensure the TSC increments at a constant rate. In Linux, you can use CPU flags in /proc/cpuinfo to check whether the TSC increment rate is constant:
constant_tsc: the TSC increments at the processor’s nominal frequency instead of instantaneous frequency.nonstop_tsc: the TSC increments even when the CPU is in sleep state.
TSC synchronization
Even if TSC is constant, it cannot be used to measure time. In the x86 architecture, TSC registers are not guaranteed to be synchronized among all CPU cores. The following figure shows the measured TSC on a laptop produced in 2020 equipped with the latest x64 CPU at that time. As we can see, among the 16 cores, CPU 0’s TSC value has an offset.

TSC values for 16 CPU cores
Recall that in tracing, each span needs two timestamps, representing the start and end of the event. Due to the thread scheduling, the reads of the two timestamps may happen on different CPU cores. As a result, the delta of the two TSC values can produce incorrect elapsed time when the TSC is not synchronized between cores.
For example:
- At t1, the thread is running on Core 1 and reads tsc1.
- The operating system schedules the thread from Core 1 to Core 2.
- At t2, the thread is running on Core 2 and reads tsc2.

An example of TSC value calculation for multiple cores
In the example above, the elapsed TSC (tsc2 – tsc1) is even negative!
To solve this problem, TiKV synchronizes the TSC value of each core by calculating TSC offsets:
- TiKV arbitrarily takes two TSC values at two physical times on each core.
- The physical time is used as the x-axis, and the TSC values are used as the y-axis. They can be used to form a line.
- The TSC offset of each core is the gap of the line at y-axis, as shown in the following figure:

TSC value offset
When the TSC offset is calculated, the process of obtaining the TSC values must not be on the same core. In Linux, you can use sched_setaffinity to set the thread’s affinity to make the thread run on a certain core:
{{< copyable “” >}}
fn set_affinity(cpuid: usize) -> Result<(), Error> {
use libc::{cpu_set_t, sched_setaffinity, CPU_SET};
use std::mem::{size_of, zeroed};
let mut set = unsafe { zeroed::<cpu_set_t>() };
unsafe { CPU_SET(cpuid, &mut set) };
// Set the current thread's core affinity.
if unsafe {
sched_setaffinity(
0, // Defaults to current thread
size_of::<cpu_set_t>(),
&set as *const _,
)
} != 0
{
Err(std::io::Error::last_os_error().into())
} else {
Ok(())
}
}
Now, we know the TSC offset of each CPU core. Next, we need to find out which CPU core we’re working on. This can be known by using the RDTSCP command, which helps us atomically get the TSC value and CPU ID at the same time.
The Rust code is as follows:
{{< copyable “” >}}
#[cfg(any(target_arch = "x86", target_arch = "x86_64"))]
fn tsc_with_cpuid() -> (u64, usize) {
#[cfg(target_arch = "x86")]
use core::arch::x86::__rdtscp;
#[cfg(target_arch = "x86_64")]
use core::arch::x86_64::__rdtscp;
let mut aux = std::mem::MaybeUninit::<u32>::uninit();
let tsc = unsafe { __rdtscp(aux.as_mut_ptr()) };
let aux = unsafe { aux.assume_init() };
// IA32_TSC_AUX are encoded by Linux kernel as follow format:
//
// 31 12 11 0
// [ node id ][ cpu id ]
(tsc, (aux & 0xfff) as usize)
}
The high-precision and efficient time measurement solution described above has been extracted into a Rust library named minstant, which can be reused for similar requirements.
Span collection
Spans may be generated on each thread and finally be collected and aggregated into a trace. Therefore, we need a cross-thread span collection mechanism. Span collection is a common performance bottleneck of tracing libraries.
Common methods to perform thread-safe span collection are:
Arc<Mutex<Vec<Span>>>std::sync::mpsc::Receiver<Span>crossbeam::channel::Receiver<Span>
Among these methods, crossbeam::channel is the best choice. It takes about 40 ns to send and collect a span. This is not the end. To improve performance, TiKV uses a different method than the above three to collect spans:
- For the same thread, TiKV only collects spans on the local thread without any resource contention.
- A batch of spans are collected and sent to the global collector.
Local span
TiKV maintains a thread-local structure LocalSpanLine for each thread. It generates and stores LocalSpan. Another thread-local structure LocalCollector drives LocalSpanLine and collects LocalSpan. The following figure shows the relationship between these three.

LocalSpanLine in TiKV
Because LocalSpan, LocalSpanLine, and LocalCollector are all thread-local, they don’t introduce contentions and don’t harm caches. As a result, the performance is extremely high: it only takes 4 ns to push a span into a local vector, as simple as a Vec::push.
In addition, when constructing the span hierarchy, thread-local variables can be used to implement the implicit context mechanism: users don’t need to modify the function signature to pass the tracing context, which greatly reduces the intrusion of existing code.
Now, let’s take a closer look at the implementation details of LocalSpan creation and collection.
LocalSpanLine maintains a container, SpanQueue, to load the ongoing or completed LocalSpans. “Ongoing” means that the start time of the event indicated by LocalSpan is known, but the end time is not. The LocalSpans are stored in the Vec structure inside SpanQueue.
To construct the parent-child dependency between LocalSpans implicitly, the context passing relies on the next_parent_id variable that is maintained by SpanQueue.
Next, we will use some examples to describe the process in detail.
Suppose we have a foo event. It occurs at 09:00 and lasts until 09:03:
{{< copyable “” >}}
09:00 foo +
09:01 |
09:02 |
09:03 +
SpanQueue‘s initial state is empty, and next_parent_id is root. When foo occurs at 09:00, SpanQueue performs the following:
- Adds a new record and fills in the event name
foo, start time09:00, and end timeempty. - Assigns
next_parent_id‘s value to foo’s parent. - Updates
next_parent_idtofoo. - Returns the index value
0to receive the notification of the event end and backfill the end time.
| Index | Event | Start time | End time | Parent | next_parent_id |
| 0 | foo | 09:00 | N/A | root | foo |
At the end of foo (at 09:03), the user submits the index and informs SpanQueue that the event is over. SpanQueue starts backfilling. It:
- Indexes to the record where the foo event is located by the submitted index.
- Backfills the end time as
09:03. - Updates
next_parent_idto the record’s parent.
| Index | Event | Start time | End time | Parent | next_parent_id |
| 0 | foo | 09:00 | 09:03 | root | root |
The above example describes a single event’s recording process. It’s simple and effective. In fact, recording multiple events is only a repetition of the above process. For example, in the following process, the foo event contains two sub-events: bar and baz.
{{< copyable “” >}}
09:00 foo +
09:01 | bar +
09:02 | |
09:03 | +
09:04 |
09:05 | baz +
09:06 | |
09:07 | +
09:08 +
As mentioned above, in addition to recording the start and end time of each event, SpanQueue also needs to record the parent-child dependency between each event. In the following example, when foo occurs, SpanQueue‘s storage content is the same as above. When bar occurs, SpanQueue sets the bar’s parent to next_parent_id‘s current value (foo) and and updates next_parent_id to bar:
| Index | Event | Start time | End time | Parent | next_parent_id |
| 0 | foo | 09:00 | N/A | root | bar |
| 1 | bar | 09:01 | N/A | foo |
When bar is over, it updates bar’s end time and the next_parent_id variable based on the backfilling steps mentioned above:
| Index | Event | Start time | End time | Parent | next_parent_id |
| 0 | foo | 09:00 | N/A | root | foo |
| 1 | bar | 09:01 | 09:03 | foo |
Finally, by repeating the above steps, SpanQueue records the information of these three events in an efficient way:
| Index | Event | Start time | End time | Parent | next_parent_id |
| 0 | foo | 09:00 | 09:08 | root | root |
| 1 | bar | 09:01 | 09:03 | foo | |
| 2 | baz | 09:05 | 09:07 | foo |
We can connect these records in series to form the following trace tree structure:

Trace tree structure
Normal span
Although the recording of LocalSpan is efficient, it’s not flexible enough due to its thread-local implementation. For example, in an asynchronous scenario, the creation and termination of some spans occur in different threads, so that the thread-local implementation doesn’t work any longer.
For these problems, TiKV retains the thread-safe span recording method described at the beginning of the article: crossbeam::channel collects a single span at a time. This is called a NormalSpan.
From an implementation point of view, NormalSpan information is not recorded in the thread-local container, but is maintained by the corresponding variables to facilitate cross-thread movement. The parent-child relationship between NormalSpans is no longer implicitly constructed by the thread local. You need to specify it manually.
However, NormalSpan and LocalSpan are not completely isolated. TiKV connects them through the following interactive methods. A set of LocalSpans collected from LocalCollector can be mounted on NormalSpan as a subtree, as shown in the following figure. The number of mounts is unlimited. By allowing many-to-many mounting methods, TiKV supports tracing batch scenarios to a certain extent. Most tracing libraries in the community do not offer this.

LocalSpans can be mounted on NormalSpan
The above implementation forms the fast and slow paths of span collection. They work together to complete the recording of a request’s execution path information:
LocalSpancannot span threads but records efficiently. CollectingLocalSpans in batches and then mounting them to ordinary spans means very low overhead.- The recording of ordinary span is slow, but it can be passed across threads and is more flexible to use.
How to use the high-performance tracing library
We extracted TiKV’s high-performance tracing logic into an independent library minitrace-rust. To use it, the general steps are:
- When the request arrives, create the corresponding root span.
- When the request is on the execution path, record the event occurrence.
- When the request is complete, collect all spans generated on the execution path.
Create and collect a root span
Usually, we can create a root span at the beginning of a request:
{{< copyable “” >}}
for req in listener.incoming() {
let (root_span, collector) = Span::root("http request");
let guard = root_span.enter();
my_request_handler(req);
}
By using the “guard,” the span can be ended automatically when the scope exits. In addition to returning the root span, Span::root(event) also returns a collector. The collector has a one-to-one correspondence with the root span. When the request is completed, we can call the collector’s collect method to collect all spans generated on the execution path.
{{< copyable “” >}}
let (root_span, collector) = Span::root("http request");
let guard = root_span.enter();
handle_http_request(req);
drop((guard, root_span));
let spans = collector.collect();
Event record
We recommend that you use the trace and the trace_async macro provided by minitrace-rust for function-level event recording. This method records the following execution information for a single function:
- The call occurring time
- The call return time
- The direct or indirect caller’s reference
- The reference of the sub-function called directly or indirectly
The following example traces two synchronous functions, foo and bar, by adding trace(event) as the attribute of these two functions. We can record the function’s execution information:
{{< copyable “” >}}
#[trace("foo")]
fn foo() -> u32 {
bar();
42
}
#[trace("bar")]
fn bar() { }
The final recorded information includes the two functions’ start and end times and the function call relationship: foo calls bar.

foo calls bar
To record asynchronous functions, the steps are slightly different:
- Replace trace with
trace_asyncas follows:{{< copyable “” >}}#[trace_async("foo async")] async fn foo_aysnc() -> u32 { bar_async().await; 42 } #[trace_async("bar async")] async fn bar_async() { yield_now().await; } - Bind the future to a span. Wrap the task with the future adapter
in_spanprovided by minitrace-rust.In the Rust asynchronous context, a task refers to the future spawned to an executor, also known as the root future. For example, the followingfoo_asyncis a task:{{< copyable “” >}}executor::spawn( foo_async() );Suppose you want to trace a task like
foo_asyncand bind it to a span created bySpan::from_local_parent(event). The application code is as follows:{{< copyable “” >}}
executor::spawn( foo_async().in_span(Span::from_local_parent("Task: foo_async")) );
The following figure shows the result of the trace:

Trace the foo_async task
Conclusion
TiKV is a distributed key-value database. Adding an observation feature to TiKV can be difficult, because it has higher performance requirements than an ordinary application. In addition to tracing, TiKV and its upper SQL database TiDB also have other challenging observational requirements. PingCAP‘s Insight team focuses on solving such observation problems and implementing features. If you’re interested, join the Slack channel #sig-diagnosis for discussions!


TiDB Cloud Dedicated
TiDB Cloudのエンタープライズ版。
専用VPC上に構築された専有DBaaSでAWSとGoogle Cloudで利用可能。
TiDB Cloud Starter
TiDB Cloudのライト版。
TiDBの機能をフルマネージド環境で使用でき無料かつお客様の裁量で利用開始。